
Matt's work on the BeagleBoard accomplished the following. First and foremost, Ubuntu is now installed and running. Matt also configured the BeagleBoard for SEAS-NET so that the board can access the internet, something that will be crucial for further configurations. Next, Matt installed all of the dependencies for Dynamism. Dynamism is the software platform used to control the RHex robots. Also, all of the necessary dependencies for the Kinect libraries were installed on the board. Thus, the next logical steps are to install the actual Dynamism software and the actual Kinect libraries (but the groundwork is laid for this next step).
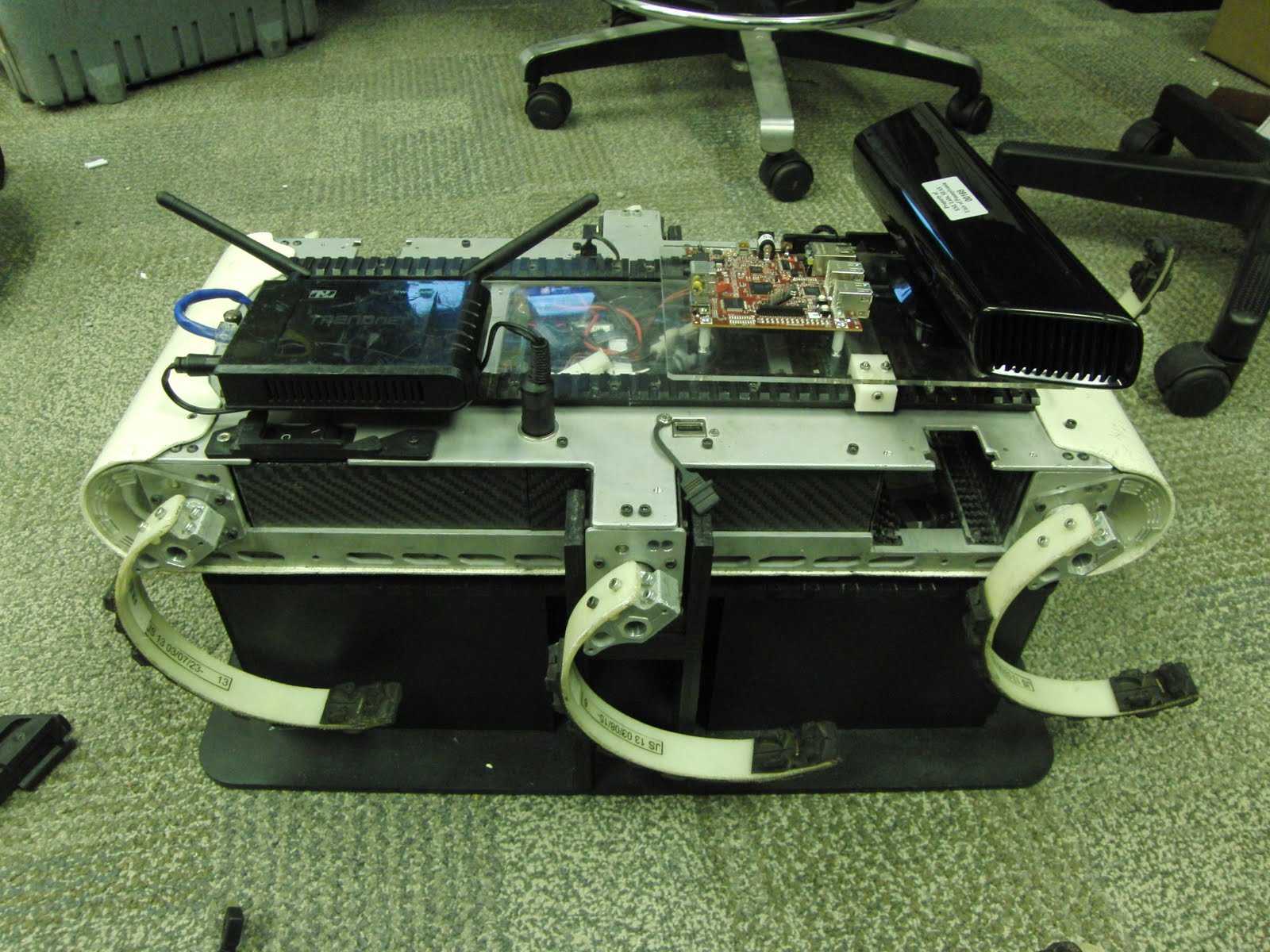
Tim's work involved inhaling a lot of fumes. He laser-cut two different prototypes of the mount, one from black ABS plastic, and one from clear acrylic. The clear acrylic mount came out nicer, so we decided to go with that one. This first prototype is just a simple plate with the necessary mounting holes cut in it. Future work will involve adding on an enclosure for the BeagleBoard, adding on some fancy etchings, and further bells and whistles. But, as of now, we have a perfectly good test platform mounted on our robot, as you can see in the pictures below.

We're happy with our progress so far, and excited to continue plowing ahead.
No comments:
Post a Comment